第一章 三角函数
任意角和弧度制
一、任意角的概念
角可以看成平面内一条射线绕着端点从一个位置旋转到另一位置所成的图形。
二、角的分类
- 正角:按逆时针方向旋转形成的角叫做正角
- 负角:按顺时针方向旋转形成的角叫做负角
- 零角:一条射线没有作任何旋转形成的角叫做零角
三、象限角
定义:为了研究角的方便,常把角放在平面直角坐标系内,具体做法为:角的顶点与坐标原点重合,角的始边与
象限角的表达方式不唯一,以下是常用表达方式
第一象限角:
第二象限角:
第三象限角:
第四象限角:
四、轴线角的表示
轴线角表达方法方式也不唯一,以下是常用表达方式
五、终边相同的角
一般地,所有与角
弧度制与角度制的换算
一、弧度制的定义
弧度制:任一已知角
规定:正角的弧度数为正数,负角的弧度数为负数,零角的弧度数为零。
二、角度与弧度之间的互化
- 角度转换成弧度:
- 弧度转换成角度:
三、常用公式:设扇形的半径为
- 扇形弧长 :
- 扇形面积:
三角函数概念及性质
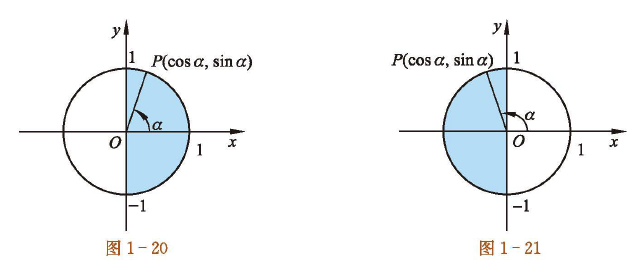
一、三角函数的定义
设角
其中
二、三角函数的定义域
正弦函数、余弦函数的定义域均是
三、三角函数的最值和值域:
设任意角
当
当
因为函数
四、三角函数的周期性
对于任意一个角
五、三角函数的单调性
正弦函数在区间
由正弦函数的周期性可知,对任意的
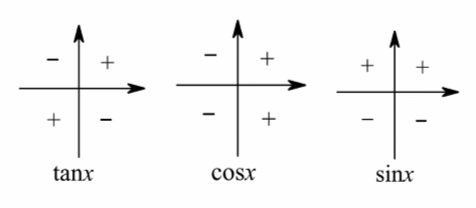
六、三角函数的符号
七、三角函数的对称
八、
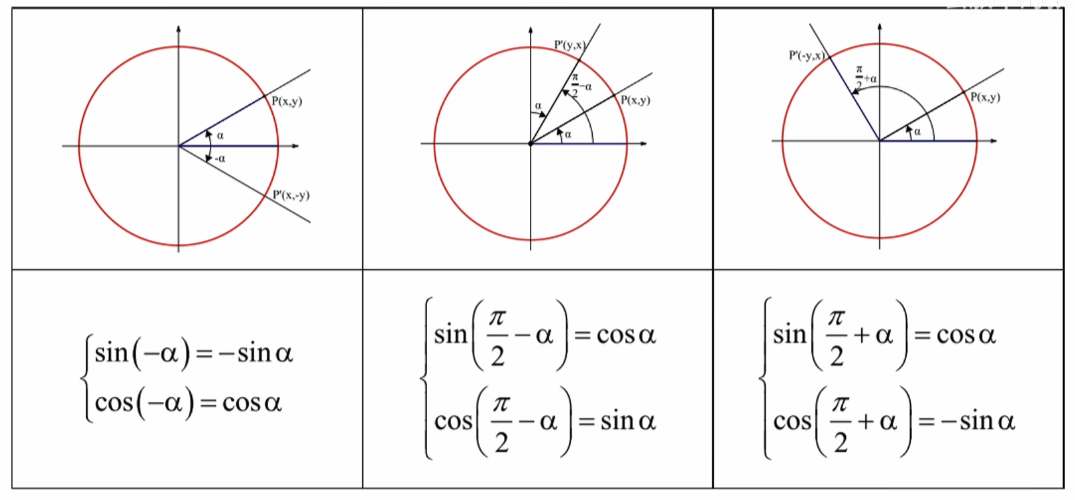
诱导公式
诱导公式,目的是将
运用诱导公式,我们需熟练掌握“奇变偶不变,符号看象限”这句话。
- 奇变偶不变:当
为奇数时,三角函数名变化;当 是偶数时,三角函数名不变; - 符号看象限:将
看作锐角,看变换后的 $k\cdot\frac{\pi}2\pm\alpha $ 所在象限对应的原三角函数是什么符号。

整体法求三角函数值
例题:已知
解:令
同角三角函数的关系
, - 常用变形
和角公式、差角公式
二级结论: